![]()
U 1417

- Zurück zum Inhalt - nach oben -
Zitate aus der Robbe Bauanleitung:
Werden die Motordrehzahl und damit die Geschwindigkeit erhöht taucht das Boot automatisch. Die Langlöcher im Rumpf erlauben, das Eindringen und Ablaufen des Wassers so dass eine Pumpe nicht erforderlich ist.
Bei einer bestimmten Tauchtiefe und Geschwindigkeit bewirkt der Wasserdruck auf den kippbar gelagerten Radarschirm der Tauchautomatik eine Bewegung nach hinten. Diese Bewegung wird mechanisch auf die vorderen Tiefenruder übertragen. Diese erhalten einen positiven Anstellwinkel, wodurch das Auftauchen des Boots bewirkt wird.
Sobald der Radarschirm sich nicht mehr unter Wasser befindet kehren die vorderen Tiefenruder in ihre Ausgangslage zurück. Es kann erneut getaucht wer den, wobei die Tauchdauer über die Geschwindigkeit beeinflussbar ist. ....
Das Boot kann wahlweise über 2 oder 3 Kanäle gesteuert werden Bei der Steuerung über2 Kanäle ist die Tauchfahrt von der Geschwindigkeit und der Einstellung der Tauchautomatik abhängig.<<
Mit 3 Kanälen kann der hintere Tiefenruder die Tauchautomatik bei Unterwasserfahrt übersteuern >> d.h. die Tauchtiefe ist direkt zu regulieren. Bei entsprechendem Ziehen des Tiefenruders ist schnelle Überwasserfahrt möglich ohne dass das Boot taucht.<< (siehe auch Grafiken ganz unten)

Weiter aus dem ROBBE Prospekt zum Thema: Dynamisch Tauchen
>> Das bedeutet, dass bei Langsamfahrt das U-Boot zunächst an der Oberfläche bleibt.
Wird die Geschwindigkeit jedoch erhöht, taucht das Boot automatisch ab. Unter Fahrt begrenzt eine mechanische, auf das vordere Tiefenruder wirkende Tiefenregelung die Tauchtiefe.
All dies erfolgt ohne besondere Tauchtanks, was den Vorteil hat, dass das U-Boot bei leer werdenden Antriebsakkus automatisch wieder an die Wasseroberfläche kommt
.Das Risiko eines Verlusts des Modells ist somit nahezu ausgeschlossen.<<
(mehr hierzu siehe unten)
>> .... zum Fahren und Tauchen nur die Seitenruder- und Motorregelfunktion gesteuert werden, ist eine Zweikanal-Anlage ausreichend.
Mit dem wahlweise über einen dritten Kanal gesteuerten Tiefenruder kann die Automatik übersteuert werden. Überwasserfahrten mit hoher Geschwindigkeit oder schnelle Tauchgänge sind möglich.<<
- Zurück zum Inhalt - nach oben -
Bauliches

Der Verschluss des Druckkörpers wird mittels eines Gummidichtungsringes dabei abgedichtet.
Vorgeformte Rumpfteile bilden das Boot um diesen Druckkörper herum.
Leider mit vielen selbst anzubringenden Langlöchern für das Fluten.
Noch ein Manko des Original Bausatzes der Version 1 der Seawolf (auch der Sharkon):
die Trimmgewichte fehlen ... Alte Reifenauswucht-Bleistücke habe ich verwendet...
Das Boot baute ich für 3 Kanal Steuerung, d.h. das hintere Tiefenruder ist steuerbar.
Was Robbe ( siehe Zitat oben) behauptet kann ich so allerdings nicht unterschreiben
da die „Tauchautomatik“ trotzdem arbeiten muss - natürlich anders getrimmt,
aber ganz abschalten wollte ich diese auch nicht.
- Zurück zum Inhalt - nach oben -
Änderungen in der Bauphase
Also habe ich im vorderen Druckkörperbereich eine 6 polige Platinen Verbindung so eingearbeitet, dass beim Einschieben des Motorträgers eine Verbindung zu Stande kommt – Buchse an den festen Teilen mit wasserdicht verklebten Leitungen nach außen – an diese habe ich zwei superhelle rote Led mit entsprechender Blinkelektronik angeschlossen, so dass das Boot im Betrieb auf dem Turm und auf dem Rumpf rot blinkt.
Eine Weitere LED ist im Heckbereich wasserdicht eingebaut – diese ist an einer einfachen „Wasser im Boot“ Elektronik angeschlossen, so dass evtl. Wassereinbrüche von außen sofort zu sehen sind.

- Zurück zum Inhalt - nach oben -
Erfahrungen
Wenig Gas und Tiefenruder nach unten.Sofort neigte sich der Bug nach unten.
Das Heck jedoch kommt dabei etwas hoch aus dem Wasser, so dass die Schraube halb in der Luft läuft.....
auf einmal ist's unter Wasser und nicht mehr zu sehen. Gas weg und Tiefenruder nach oben und schon taucht es wieder auf.
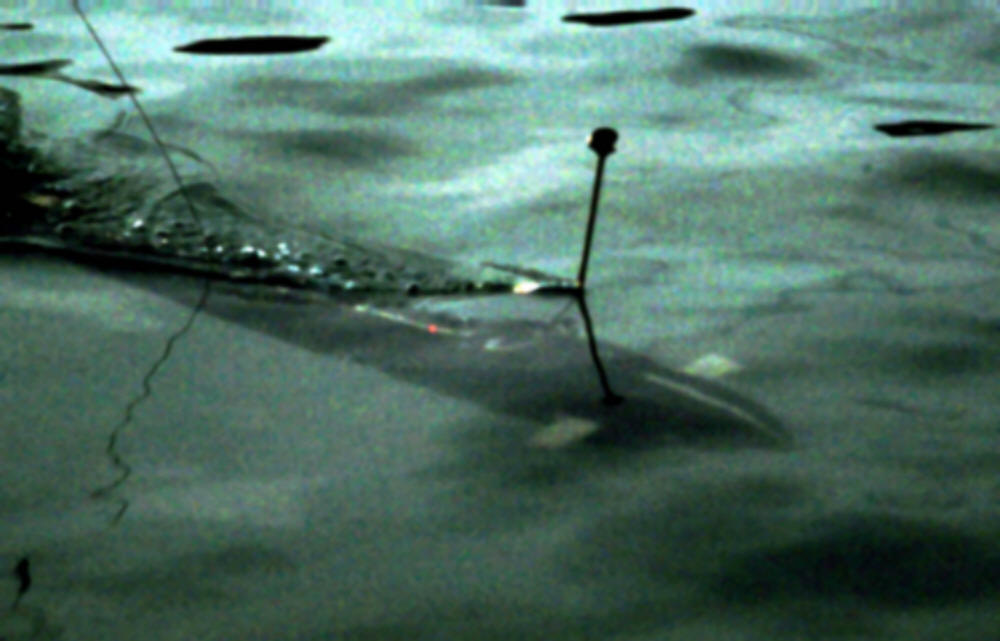
Ich fahre gerne mit dem BootAm liebstem an klaren Gewässern – die Bilder sind am Attersee in Österreich entstanden. Bootsstege sind von klar von Vorteil!
Vollgas und Tiefenruder in Mittelstellung. Durch die Trimmung taucht das Boot nun sehr realistisch ab. Sobald das Heck eintaucht kann man dieses dann mit dem Tiefenruder beschleunigen, ohne das die Schraube an der Luft dreht
Ich lies das Boot beim Seebad Döbriach am östlichen Ende des Sees fahren – und irgendwann tauche es nicht mehr auf !
Was tun ? Es waren an diesem Badeplatz glücklicherweise Wasserretter (Bademeister der Wasserrettung Österreich e.V.) mit Tauchausrüstung, dies bat ich nach dem Boot zu suchen:
"ca 1 m lang – schwarz und mit roten Blinklichtern".
Die haben mich angesehen als ob ich verrückt wäre, gaben dann aber nach und gingen Unterwasser.
Nach einigen Minuten hatten sie das Boot in den Pflanzen (in ca 3 m Tiefe und ca 10 m vom Ufer entfernt) gefunden und geborgen.
Diese Wasserpflanzen waren vom Ufer aus leider nicht zu sehen – ich musste dann natürlich das Boot mit den Tauchern tauchen lassen und diese waren ob des Modells begeistert.
Die originalen Balgenbeläge an den Steuergestängen altern relativ schnell
und werden undicht !

- Zurück zum Inhalt - nach oben -
Baukasteninhalt:
- Dickwandiges, Kunststoffrohr als Druckkörper, wasserdichter Verschluß des Druckkörpers, Abdichtungen erfolgen über O-Ringe
- Ausziehbare Einbauplatte für die Fernsteuerung
- Mechanik für Tauchtiefenregulierung
- Abdichtung der nach außen führenden Gestänge über Faltenbälge
- Kreuzruderanlage hinten und Tiefenruder vorn
- Stevenrohr mit angeflanschtem Getriebegehäuse, Schiffswelle mit Zahnrad, 3-Blatt-Schiffsschraube
- Tiefgezogene Rumpfrückenteile
- Strömungsgünstig geformte Bug-, Heck- und Turmteil zur Formgebung des Bootes
- Trimmgewichte
- Motor
- Entstörung
- Fett für die Stevenwelle
- Von außen erreichbare, zentrale Verschraubung des Druckkörpers
(kein Abnehmen der Rumpfteile erforderlich) - Elektromotor mit Entstörung und Anschlusskabel im Lieferumfang enthalten
- Bleiballast im Lieferumfang enthalten
Technische Daten:
- Länge: 900 mm
- Breite: 100 mm
- Verdrängung: 4100 g
- Zurück zum Inhalt - nach oben -
Schema: Dynamisch Tauchen und die Robbe Tauchtiefenautomatik...
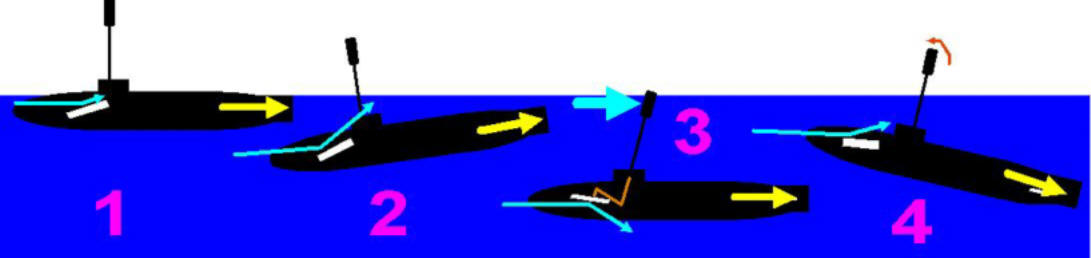
Die Robbe "Tauchautomatik - schematisch - oder der Delfinstil
gelb= Antrieb / blau Wasserdruck / rot - mechanische Verbindung, Federkraft